你的位置:美洲杯现金买球投注(官网)欢迎您 > 新闻资讯 > 美洲杯现金买球投注最新版接着等于在比海外象棋更复杂的围棋界限-美洲杯现金买球投注(官网)欢迎您

2013 年的时候,自动驾驶照旧一个异常前沿和性感的办法,一如当下的 AGI,前几年的元六合,在互联网公司死灰复燃的期间,腾讯每年王人会举办一场 WE 大会,来聊一聊那一些星辰大海的话题,比如基因剪辑、脑机接口、六合探索等等。
我第一次讲和「自动驾驶」的办法,等于在 2013 年第一届腾讯 WE 大会上,那时有嘉宾抛出了如下不雅点:
本事问题不高深决,难以解决的是法律问题。在十年之内,蹂躏者是可以买到无东谈主驾驶汽车的。如若机器它作念的判断正确率达到 95%,那可能照旧要比东谈主好、比东谈主快。十年之期已到,这些话算是大致应验,当萝卜快跑也曾在多个城市大范围启程,主流新势力品牌的高端车型具备高阶智能驾驶能力,以及特斯拉 FSD V12 版块的推送,还有特斯拉 RoboTaxi 行将发布,自动驾驶本事正从 L2+ 级别往 L4 级别迈进,「车坐不开」变得并不远方。
等一下,当我拿出这张图,大驾该怎么支吾?

这是广州城区日常交通气象的一个普通场景:活泼车谈不仅跑着海量乱窜的两轮电瓶车,以致龟速的电动轮椅也跑在活泼车谈上。
此时,智能驾驶的上风和挑战就全部体现:上风是智能驾驶莫得心情,不会不悦不会路怒;挑战是龟速电动轮椅和乱窜侵入活泼车谈的两轮电瓶车对于智能驾驶来说,是很不好预测和处理的场景。
施行上,十年前预测自动驾驶发展大多基于一个逻辑:路上的车和东谈主王人顺从交规,红灯停绿灯行,活泼车谈不会出现害东谈主精。
但当厂商们录用带智能驾驶功能的汽车到蹂躏者手上时,汽车靠近的情况等于上头这张图:马路是我家,交规去 TM。
经典智驾逻辑:「感知 — 操办 — 限度」
当下主流的智能驾驶决策,不管是高精舆图决策,照旧无图决策,王人依赖于大批工程师左证各式千般的谈路场景去编写划定,以期杀青穷举所有这个词谈路气象和对应步调,杀青尽可能的智能驾驶活动。
不外现实谈路情况不仅长短不一,不可能被穷举,同期现实天下也在束缚变化,随时有新的谈路场景出现。因而,此前智能驾驶研发是一场「无尽讲和」。
比如说,环岛收支这个场景,在 7 月份之前,还莫得几家车企能够攻克,因为场景复杂,感知受限,操办决策费事。
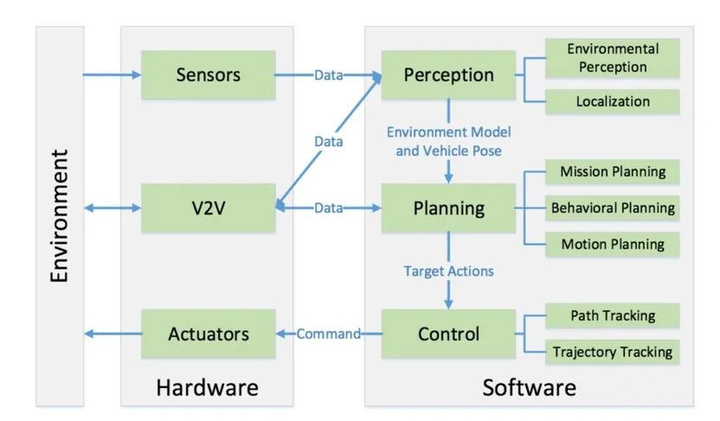
浅显来讲,在特斯拉 FSD V12 版块取舍「端到端」本事决策之前,简直所有这个词的智驾决策王人可以归结为「感知 Perception — 操办 Planning — 限度 Control」三个大模块,这一套经过遮盖各式千般的场景,比如经典的三分法:高速场景,城区场景和停车场景。
这几个大场景又可以细分细分再细分,智驾工程师们针对场景来编写划定代码,汽车的激光雷达、毫米波雷达和录像头还有定位系斡旋起互助,感知和纪录谈路、环境和位置信息,然后 BEV(Birds-Eyes-View)本事或者 OCC(Occupancy Network)本事或者其他的本事来把这些传感器获取的信息酿成能被智驾系统会通的「真的天下的虚构投影」,智驾系统再左证这种「天下投影」操办出合理的行进阶梯和领路操办,进而得出限度决策,终末汽车反应决策,就酿成了「减慢,左侧变向,提前走左侧掉头车谈,迫切刹车回避路中间乱入的两轮电瓶车,继续前进,调头」这种智能驾驶活动。
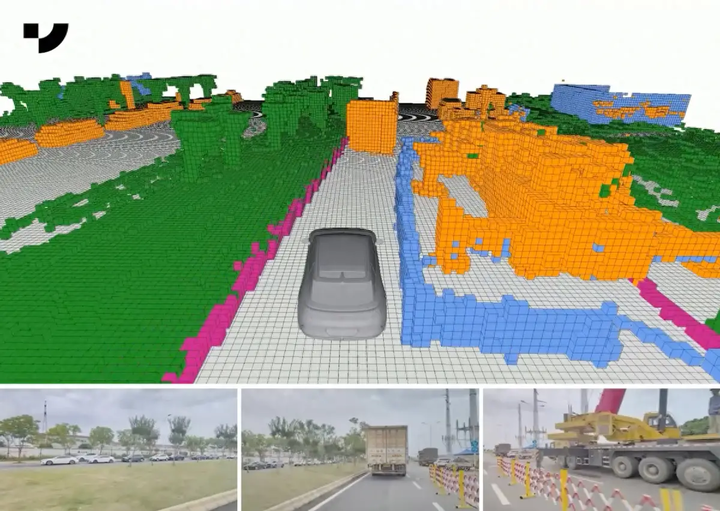
▲ 极越汽车 OCC 占用汇集露出图
如若智能驾驶使用到了 OCC 占用汇集本事,那么咱们就可以打个比方,在智驾系统里,外部天下就像《我的天下》那样,是由一个个方块(体素)构成的,如若谈路前列一派坦途,那表面启程上就莫得方块,车就可以勇猛往前走,如若前列有一个静止的小方块,那可能是雪糕桶跑到路中间了,如若右侧有逐渐出动的长条,可能等于行东谈主,如若是左边车谈快速出动的超大长方形块,那可能是大货车……
在这个「感知 — 操办(决策)— 限度」的大逻辑下,不管是此前的基于高精舆图的决策,照旧后续更依赖于多种传感器会通和高土产货算力的无图 NOA(自动导航扶助驾驶)决策,王人莫得脱离这个基本逻辑,研发的框架和工程师的职责,也王人是在各个模块里各司其职。
直到,「端到端」的出现。
什么是「端到端」?
印象中有三次东谈主工智能的秀气性事件,引起了等闲的社会盘考。
第一次是 1997 年 IBM 的海外象棋机器东谈主「深蓝」驯服了海外象棋巨匠卡斯帕罗夫,但站在如今的时辰点看「深蓝」,就会合计它并非那么智能,它只不外是存储了巨量的开局和残局棋谱,然后搭配高效的搜索算法和评估体系,选出最得当的下法。
也等于说,深蓝鄙人棋的时候,中间的决策对于东谈主类来说是可诠释注解的,逻辑明晰的。

接着等于在比海外象棋更复杂的围棋界限,DeepMind 的 AlphaGo 赢了李世石和柯洁,布告东谈主工智能的水平远超所有这个词东谈主类棋手。
AlphaGo 的逻辑不是搜索匹配棋谱,毕竟围棋的棋盘格子数和棋子数目远超海外象棋,蕴含的可能性太高,当今的策画机没法算出其中所有这个词的可能性。但基于神经汇集的深度学习,AlphaGo 一来可以自我学习自我进化,二来可以判辨下一步何如下更接近到手,对于东谈主类来说,AlphaGo 的下法和东谈主类想考逻辑统统不同,但中间发生了什么,东谈主工智英雄人是判辨其逻辑的。
接着等于 ChatGPT 的出现,大言语模子本事在输入和输出之间,存在着东谈主工智英雄人王人难以诠释注解的「黑盒子」,东谈主类无法准确诠释注解问问题和 ChatGPT 呈文之间,具体发生了什么。
以此作念个比方,智能驾驶本事此前基于「感知 — 操办(决策)— 限度」的研发逻辑,肖似于 AlphaGo ,AlphaGo 的卷积神经汇集(CNNs)能够处理棋盘的二维结构,索求空间特征;而价值汇集和策略汇集能够提供操办和决策,此外还有强化学习和蒙特卡洛树搜索本事能优化决策。
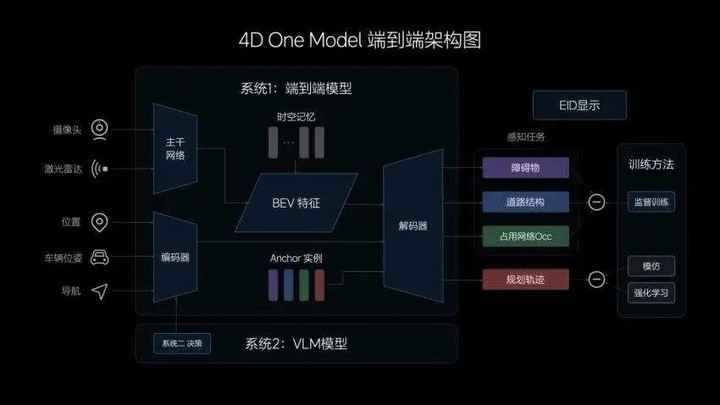
▲ 逸想智驾端到端架构图
而智能驾驶本事里的「端到端」,就肖似于 ChatGPT 背后的大言语模子本事,从原始传感器数据(如录像头、毫米波雷达、激光雷达等)到最终的限度提醒(如加快、刹车、转向等)的全经过处理。天然,现阶段这种获胜控车的神色照旧太激进,是以像是逸想的端到端就只输出轨迹,没到限度,到车辆限度之前照旧有好多欺压和冗余步调。这种方法的宗旨是简化系统架构,通过一个单一的神经汇集或模子完成通盘任务,背后不再依赖海量的场景划定代码,是统统不同的本事标的。
正如大言语模子之前强调的是参数目的大相同,端到端背后的多模态模子也存在这样一个量变产生质变的过程,特斯拉在 FSD V12 上开首使用了端到端本事,马斯克就这样说:
用 100 万个视频切片磨真金不怕火,拼集够用;200 万个,稍好一些;300 万个,就会感到 Wow(咋舌);1000 万个,那就难以置信了。
但经常使用 ChatGPT 或者其他生成式 AI 器具的东谈主就会发现,这些器具并不可靠,经常信誓旦旦地输出诞妄谜底,谓之「幻觉」。
电脑上的 AI 器具瞎呈文问题一般没啥磨折性后果,但智能驾驶事关人命安全,一个「端到端」责罚驾驶活动,还需要更多的考据和保障步调,这是个本事问题,更是个工程问题。

对话逸想智驾团队:「端到端」才是实在用 AI 作念自动驾驶
资格了前边长篇累牍的布景先容之后,终于可以切入正题:借着采访逸想智驾团队的契机,来聊一聊「端到端」怎么从表面,到上车?
逸想智驾研发副总裁郎咸一又告诉爱范儿和董车会:
咱们本年春季计策会上有一个紧要反想,等于咱们太过于追求竞争,比方说老是盯着华为什么的,它开几许城,它的操办是几许,其实单纯的盯操办,比如说我比华为好极少,或比华为差极少,并不行代表用户实在的需求。
总结到用户的开车需求上来看,实在的用户需求不是秉承率操办低到几许,用户需要的是智驾像老司机那样去开车,而这种拟东谈主化的需求依靠正本划定化的模块化的研发架构很难杀青。但逸想里面预研的「端到端」会作念得更好。
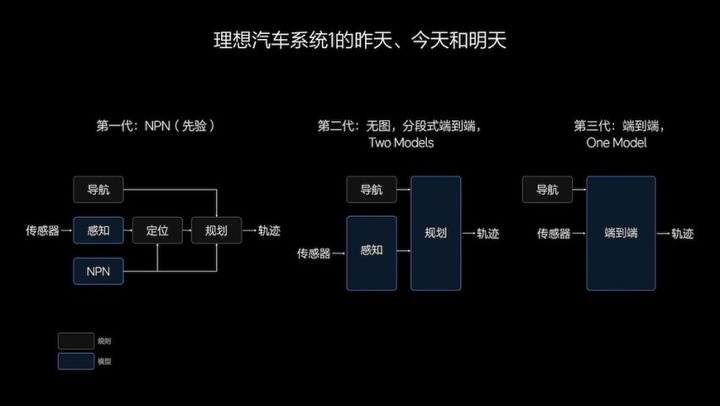
基于此,在一年之间,逸想的智驾本事决策资格了三代调整:从有图到 NPN(神经先验汇集)到无图,再到端到端。
郎咸一又这样诠释注解端到端施行上的不同:
端到端它名义上看是一个大模子替代几个小的模子,其实它是一个分水岭,从端到端运行,才是实在地用东谈主工智能的神色来作念自动驾驶,前边其实还不是。
因为它是数据驱动的,由算力配合上数据,配合上模子,是高度自动化的自我迭代过程,这个过程迭代的是模子或系统我方的能力。那么之前咱们作念了什么呢?咱们作念的王人是系统各式千般的功能,高下匝谈的功能或过收费站的功能。
功能和能力,是有很大分袂的。
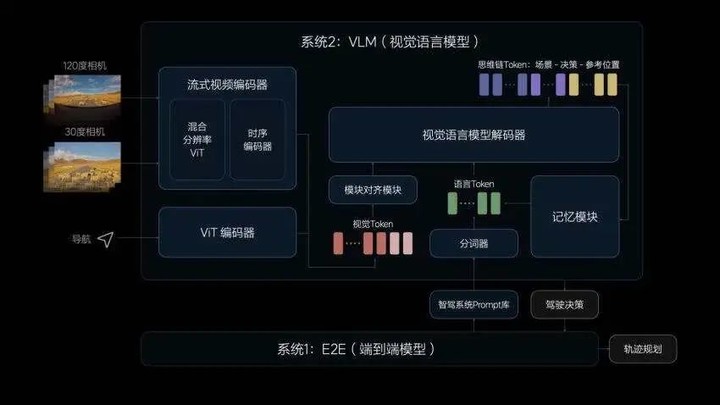
但施行上,逸想智能驾驶夏令发布会上发布的下一代自动驾驶系统是「端到端+ VLM(视觉言语模子)」双系统决策。
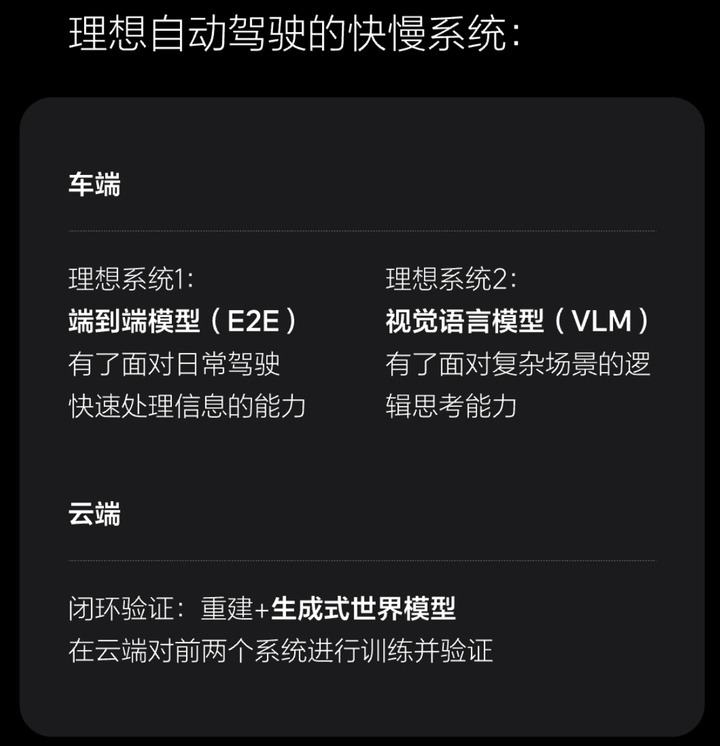
既然前提是要把智驾作念得像老司机驾驶,尽可能拟东谈主化,那就得接洽东谈主究竟是何如作念事儿的,这里的表面依据是诺贝尔奖取得者丹尼尔·卡尼曼在《想考,快与慢》中的快慢系统表面:
东谈主的快系统依靠直观和本能,在 95% 的场景下保握高效果;东谈主的慢系统依靠稀奇志的分析和想考,先容 5% 场景的高上限。
逸想「端到端+ VLM」双系统里的端到端等于快系统,有日常驾驶场景里快速处理信息的能力,而 VLM 视觉言语模子有靠近复杂场景的逻辑想考能力。
这个快系统的究竟有多快呢?
逸想智驾本事研发负责东谈主贾鹏说:
当今咱们端到端蔓延相当于是传感器进来到限度输出 100 多毫秒,不到 200 毫秒,曩昔分模块或者得到 300 多快要 400 毫秒。
这个慢系统为什么又是必要的呢?
郎咸一又诠释注解说:
咱们当今正在探索它(VLM)的一些能力,它至少在刚才说的主路、辅路车谈取舍这块有一些价值,如若莫得它,也不会出安全问题。咱们在 L3 级别智能驾驶起主要的撑握作用照旧端到端,代表这个东谈主宽绰的活动下的驾驶能力。
但到了 L4 级别智能驾驶一定是 VLM 或者大模子在这里面起到更紧要的作用,可能 90% 以上的时辰它不起作用,但它起作用这些内容,是决定这个系统到底是 L3 级别照旧 L4 级别的一个重要点,VLM 是能实在的能去支吾这种未知的场景。
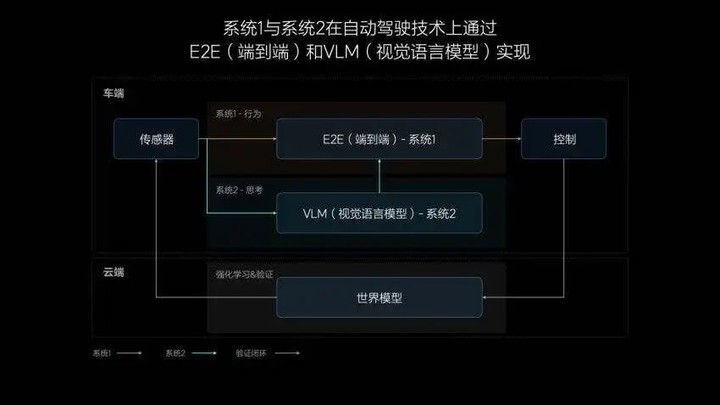
逸想并不是一个端到端模子就完事儿,而是取舍了更妥贴的双系统决策来遮盖全场景,端到端负责让驾驶活动更拟东谈主,更像老司机,而 VLM 视觉言语模子托住下限,更能拔高上限,有望达到更高等别的自动驾驶。
再深究一下,和原教旨主义的端到端终末还要负责汽车限度不同,逸想的端到端其实也莫得获胜能控车,而是到了输出轨迹这一层级。
贾鹏说:
咱们的端到端模子是到了轨迹,轨迹之后加一些安全兜底,因为在模子莫得达到上限之前,照旧要有一些处理的东西,比如说猛打标的盘这样的事,给他兜掉。
而在施行的智能驾驶过程中,两个系统亦然同期职责的,贾鹏具体诠释注解了两个系统怎么共同互助:
这俩系斡旋直王人在及时运行,一块跑是端到端,因为模子小一些,它的频率比拟高,比如跑个十几赫兹。另外阿谁模子范围参数目就大的多,是 22 亿参数,当前能跑到或者 3~4 赫兹之间,其实亦然一直在跑。
VLM 发决策扫尾给参考点,比如说在 ETC 进高速的时候,其实车很难判断要走哪个谈,我要走东谈主工照旧走 ETC?这个时候 VLM 也一直王人在,如若想去选 ETC 可以走 ETC 这条谈,如若想走东谈主工可以走东谈主工这条谈,只不外它是把决策扫尾和参考的轨迹扔给端到端模子,端到端模子推理后,再取舍这个信息。
其实 VLM 视觉言语模子是个扶助信息,最终的轨迹扫尾是模子推理的扫尾,它是有一定概率被取舍的。
为什么端到端能够在智能驾驶界限掀翻如斯大的波浪?照旧因为它背后远大的可能性,以及在找「终极谜底」上的指向性道理。
简言之,在这套决策上,寰球王人还远远莫得摸到能力的天花板,本事探索和工程扩充,干预到了野外区。
贾鹏进一步诠释注解双系统的道理,以及可能性:
其实东谈主等于双系统,固然物理结构上并不是那么明确的双系统,但是东谈主的想维神色等于双系统,是以咱们那时有一个想法是在端到端的基础上再加一个实在有泛化能力,有逻辑想考能力的一套系统,自关联词然就意想了 VLM。
固然 VLM 不获胜控车,但是会提供决策。
再朝后这套东西何如发展?可能跟着算力的加多,比如特斯拉 FSD 12.3 到 12.5 版块,参数普及了 5 倍,可以撑握弥散大的模子。
我合计以后两个趋势,第一是模子范围变大,系斡旋和系统二当今照旧端到端加 VLM 两个模子,这两个模子有可能合一,当前是比拟松耦合,翌日可以作念比拟紧耦合的。
第二方面也可以模仿当今多模态模子的大模子发展趋势,它们就朝这种原生多模态走,既能作念言语也能作念语音,也能作念视觉,也能作念激光雷达,我合计这是翌日要想考的事情。
咱们这套范式应该能够撑握咱们作念到(L4 级自动驾驶),因为在机器东谈主具身智能上咱们也曾看到它的利用雏形,参考东谈主的想维过程,这套东西可能等于咱们心目中想追求的终极谜底。
终极谜底的真义是咱们用这套表面和这套框架去作念实在的东谈主工智能。

不外在聊终极谜底之前,贾鹏诠释注解了为什么只消端到端能够解决「环岛收支」的智驾难题:
如若是分段式的(智驾决策),前边是个感知,要给规控去作念各式假定,作念个掉头,还得把掉头线拟合出来,不同的路口的掉头还不太相同,曲率王人不太相同,是以你很难作念到一套代码就可以把所有这个词环岛掉头责罚,种类太多了。
对于环岛这件事,也有一个好玩的故事,在咱们(模子数据包含)或者 80 万 clips(视频片断)的时候,还过不了环岛,自后倏得发现一天咱们(喂了)100 万 clips 它我方能过环岛,我合计是 100 万(视频片断)里头刚好有一些环岛数据放在里面了。
模子确乎很狠恶,你喂了什么数据他就能学会,这是模子的魔力所在,就像 ETC,我合计如若你开咱们当今端到端的版块,会发现其实 ETC 它我方能过,但是问题是它当今不知谈我要走哪条谈,到底是走 ETC 谈照旧走东谈主工谈,他我方会纵容乱选一个,会让你合计不太安全,咱们后头想作念的等于 VLM 可以给他这个指引,因为 VLM 是可以会通语翰墨,会通 LED 联接灯的。
对于端到端表面部分的 What 和 Why,至此也有了或者的概括,有了数据和模子之后,等于实在地上车了,也等于 How,这才是实在的大考设施。

▲ 逸想汽车制造车间
「磨真金不怕火端到端模子,跟真金不怕火丹没什么分袂」
郎咸一又给爱范儿和董车会讲了一个磨真金不怕火端到端模子里很离奇的小故事:
本年比拟早期的时候,刚运行作念技俩,咱们发现模子磨真金不怕火出来,平时开着还王人 ok,但等红灯的时候,车的活动就比拟歪邪,它老是想变到傍边的车谈,咱们不知谈为什么。
自后显明咱们在磨真金不怕火端到端模子的时候,删除了好多在红灯之前恭候的数据,咱们合计等了几十秒或者一分钟,这样数据没灵验。但自后发现这份数据异常紧要,它教学了这个模子,有的时候是需要恭候的,不是一朝你慢下来就要插空,就要变谈。
这个小故事诠释了,数据很猛进度上决定了模子的质料,但模子的大小是有一定搁置的,是以喂哪些数据去磨真金不怕火模子,施行上等于最中枢的职责之一。

郎咸一又打了个比方:
磨真金不怕火端到端模子,跟古代真金不怕火丹没什么分袂。古代真金不怕火炸药厚爱一硝二磺三柴炭,作念出来的炸药威力比拟大。其他配比,可能也能点个火起来。
不外对于想要磨真金不怕火端到端模子的车厂来说,「真金不怕火丹」仅仅形象地比方,而非具体的工程落所在法,数据何如来,何如选,何如磨真金不怕火,王人是科知识题。
好在逸想有一些先天上风,比如车卖得可以,销量在新势力车企里经常位居第一,路面上有 80 多万辆逸想汽车在跑,每个月还能新增四五万辆,这些车提供了十几亿公里的数据。
另外,逸想很早就意志到数据的紧要道理,打造了对于数据的器具链等基础能力,比如逸想的后台数据库杀青了一段话查找那时,写一句「雨天红灯住手线隔邻打伞途经的行东谈主」,就能找到相应的数据,这背后是一些云霄的小模子,比如数据挖掘模子和场景会通模子。
郎咸一又以致认为,这些数据库的器具链和基础诞生能力,某种道理上(紧要性)以致大于模子的能力,因为莫得这些考究的基建和数据,再好的模子也磨真金不怕火不出来。
底层本事决策转向,也意味着职责神色转向,当发现一个 badcase 之后,逸想里面的「分诊台」系统里的模子会自动分析这属于哪一类的场景问题,给出「分诊建议」,然后总结到模子磨真金不怕火上来解决问题。
这里也波及到职责神色的调养,正本解决具体问题的东谈主,当今变成了瞎想解决问题器具的东谈主。
为了普及「诊疗」效果,逸想里面会同期磨真金不怕火多个模子,这个过程又回到了「真金不怕火丹」的办法,贾鹏诠释注解说:
模子磨真金不怕火主要两个方面,一是数据的配方,肖似的场景到底要加几许,能把 case 解决掉,这是一个 know-how,不同的场景对数据的条款不相同。第二点是模子的超参,加入新的数据后,模子参数怎么调整,一般情况下有 5-6 版模子会同期提交磨真金不怕火,然后看哪一版解决了问题,同期得分也高。
同期磨真金不怕火多个模子,对数据库的基础诞生建议了条款,也对算力有巨梗概求,这个时候就该「钞能力」上场。这里逸想的上风依旧是车卖得多且贵,有这新势力车企里最佳的营收和正向现款流,能够撑握背后远大的算力支拨。
郎咸一又说:
咱们瞻望,如若作念到 L3 和 L4 自动驾驶,一年的磨真金不怕火算力花销得到 10 亿好意思金,翌日咱们拼的等于算力和数据,背后拼的是钱,照旧盈利能力。
当端到端模子替代了传统智驾逻辑「感知 — 操办 — 限度」里的大部单干作时,逸想关联智驾团队的最花力气的职责也合股在了「一头一尾」,头是数据,尾是考据。
除了端到端模子和 VLM 视觉言语模子这两个快慢系统以外,逸想里面还有一个系统三,称之为训练模子或者天下模子,施行上这是个考试系统,来侦察通盘智驾系统的水暖和安全性。
郎咸一又把这个考试系统比方成三个题库的贴近:
真题库:东谈主在路上驾驶的正确活动错题库:宽绰的测试和开车过程中,用户的秉承,用户的退出等活动模拟题:左证所有这个词的数据,举一反三,针对特定交流问题,生成虚构肖似场景测试比如前边提到,想要智驾开车拟东谈主化,像老司机,那么这个真题库的驾驶活动,就得是老司机的驾驶活动,逸想训练模子里的「真题库」考取了里面评分 90 分以上的司机驾驶活动,这个群体只占逸想汽车司机里 3% 的比例,会看他们驾驶的平顺性,驾驶的危机进度等等,比如司机经常开出 AEB 自动迫切刹车,那他的驾驶活动就太激进了。
经过了训练模子的大批测试之后,还会有一个「早鸟用户」的测试版块,这等于有上千辆用户车取得新的智驾系统版块,以无感知的「影子神情」在真的场景息兵路里去作念真的的考据和测试,这比任何车厂的测试车队范围王人大。
这些千东谈主早鸟用户测训练证的数据,又会自动回传,自动分析,自动迭代磨真金不怕火,进行新一轮的测试和录用。
也等于说,数据获取,模子磨真金不怕火,训练考试和用户录用是一个充满了自动化轮回逻辑的过程,东谈主的参与度其实异常少。
按照郎咸一又和贾鹏说法,上到「端到端+VLM」之后,行业到了一个接近无东谈主区的所在,这里既有暂时看不到这套系统能力上限的欢喜感,天然也有必须条款实的部分,比如当前只让端到端模子输出轨迹,轨迹之后的限度还需要安全兜底,再比如对于算力的想考:之前需要堆工程师数目,往后得堆显卡的数目。
莫得算力,王人是梦想。
莫得利润,算力亦然梦想。

再聊一下「终极谜底」:逸想,特斯拉和 OpenAI 的同归殊涂
正如马斯克一再强调「特斯拉是一家 AI 和机器东谈主公司,而不仅是一家汽车公司」相同,在采访中,郎咸一又和贾鹏也把逸想汽车比方成装在轮子上的机器东谈主,也聊到了东谈主形机器东谈主等具身智能载体在用「端到端+VLM」的框架的利用雏形。
特斯拉的 Optimus 机器东谈主承载了马斯克更大的愿景,天然亦然 FSD 的另一种载体,因为 Optimus 机器东谈主开释出的信息还相对较少,但它确乎领有「端到端」模子,依靠本机的录像头和传感器输入环境信息,然后获胜输出要道限度序列。
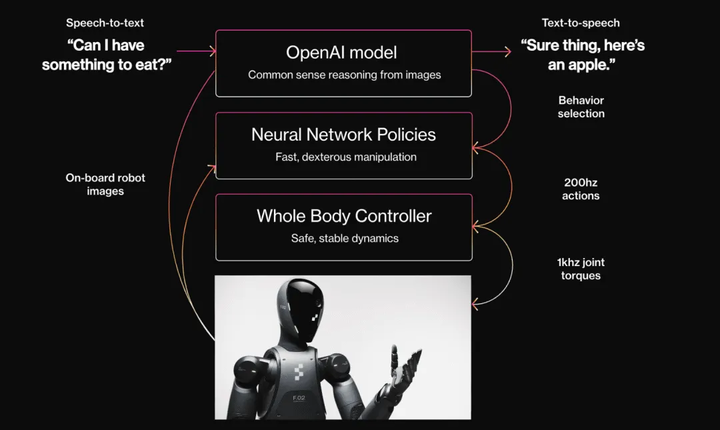
另外,OpenAI 和英伟达投资的 Figure 机器东谈主刚刚发布了旗下的第二款东谈主形机器东谈主 Figure 02,并宣称这是「天下上起先进的 AI 硬件」,其中 VLM 视觉言语模子是其紧要能力。Figure 02 的头部、前躯干和后躯干各配备六个 RGB 录像头,能够通过其 AI 驱动的视觉系统来感知和会通物理天下。在官方的态状中,Figure 02「具有超东谈主的视觉」。
天然,它天然也有 OpenAI 提供的大言语模子来和东谈主类交流。
颇为肖似的是,Optimus 机器东谈主在特斯拉的车厂里运行打工(亦然磨真金不怕火),而 Figure 02 也在良马的车厂里进行测试和磨真金不怕火,王人能够完成一些浅显的职责,而况王人在束缚进化。
三月广州花满城,唯有木棉红胜火。一年一度,广州市花木棉如约绽放,山冈上、街巷旁、公园里……它的身影随处可见,红艳的花朵,也给春天的广州增添了勃勃生机。
固然逸想汽车,特斯拉 Optimus 机器东谈主以及 Figure 机器东谈主看起来关联性不大,但一朝深究起来,底层的本事逻辑,以及对于 AI 的想考,确乎同归殊涂,这亦然「终极谜底」的由来。
咱们谈了几十年的东谈主工智能美洲杯现金买球投注最新版,要点终于从东谈主工,滚动到了智能。
声明:新浪网独家稿件,未经授权辞谢转载。 -->Powered by 美洲杯现金买球投注(官网)欢迎您 @2013-2022 RSS地图 HTML地图